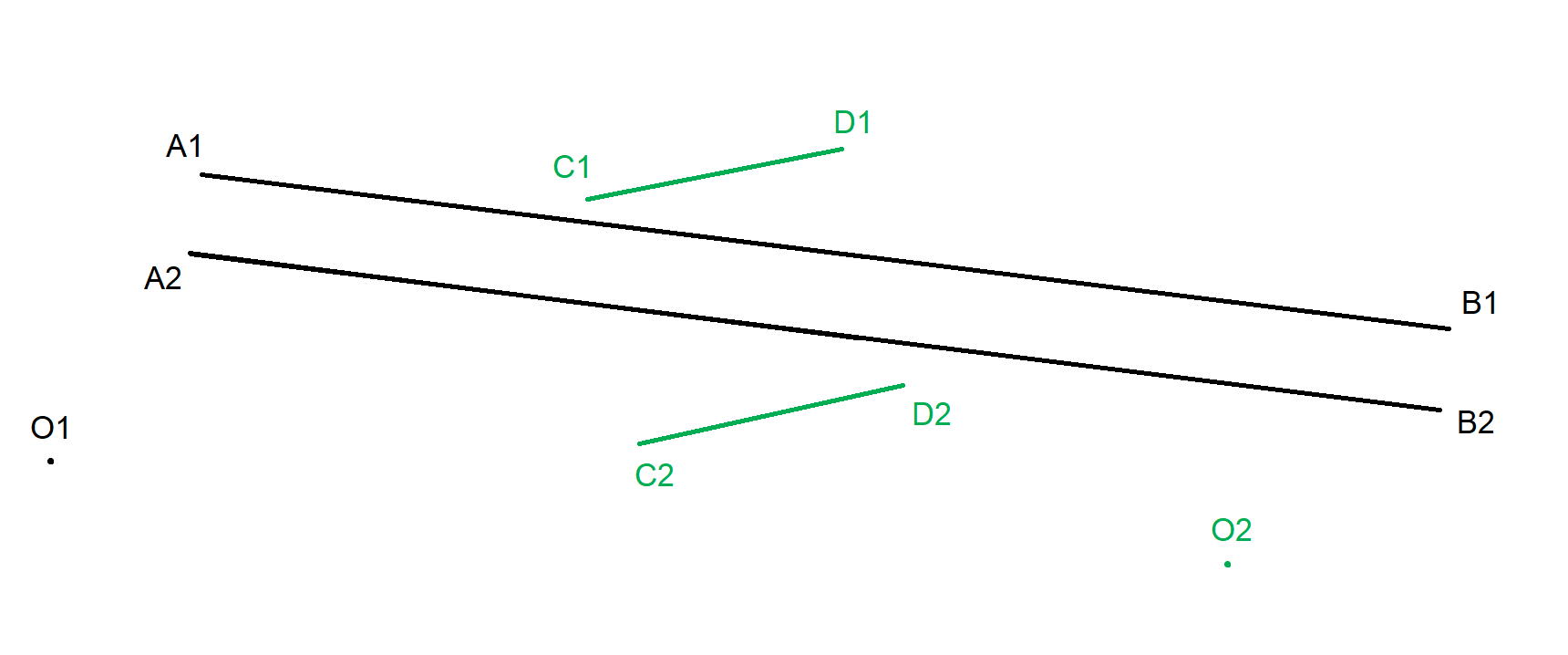
анон, помоги решить проблему. вот у меня есть 2 отрезка A1B1 и A2B2, координаты их конечных точек я
Аноним
29/05/25 Чтв 16:23:55
№
1